
Ph.D. in Computer Science and Assistant Professor at Universidade Federal de Pernambuco
contact: hfb@cin.ufpe.br
Ph.D. in Computer Science and Assistant Professor at Universidade Federal de Pernambuco
Machine Learning | Robotics | Computer Vision | Natural Language | Cognitive Science


Postgraduate Courses:
Undergraduate Courses:



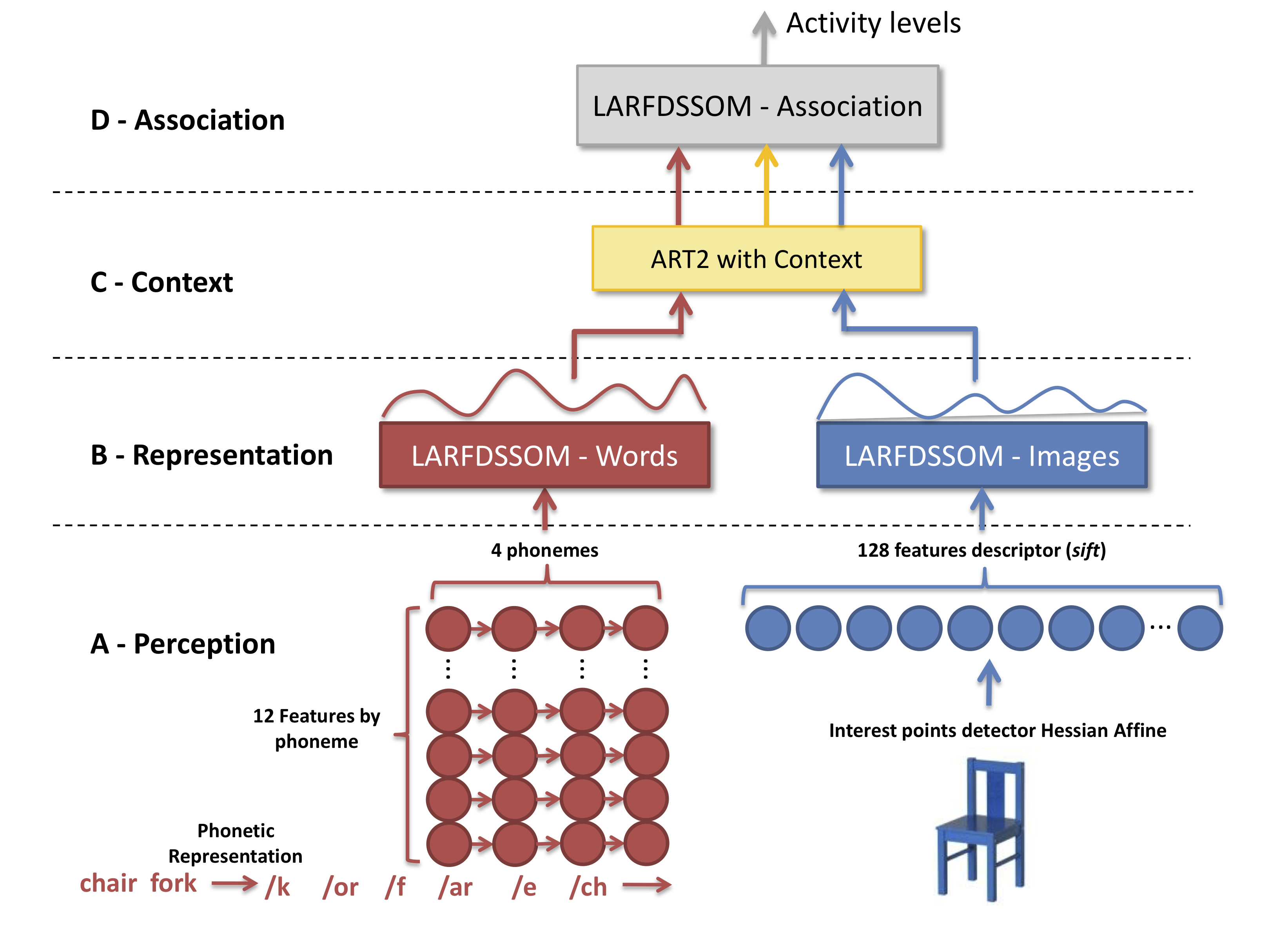
Hansenclever Bassani, Aluizio Araujo
Heitor Medeiros, Felipe Oliveira, Hansenclever Bassani, Aluizio Araujo
Pedro Braga, Hansenclever Bassani
Pedro Braga, Hansenclever Bassani
Ygor C. N. Sousa, Hansenclever Bassani
Raphael C. Brito, Hansenclever Bassani
Lucas R. C. de Farias, Pedro Braga, Hansenclever Bassani, Aluizio Araujo
Hansenclever Bassani, Aluizio Araujo


